![]()
![]() .
.
![]() .
.
![]()
![]()
![]() .
.
![]() .
.
![]()
Modular Versatile Mobility Enhancement Technology
The MOVEMENT project resulted in a system of building blocks with the autonomous platform in the core. When the platform is combined with modules like chair and table, the user can access a variety of functions from the common MOVEMENT user interface. As a feature specific to MOVEMENT the docking process between platform and modules is fully automated.
The user interface can be tailored to the individual needs of specific users and offers many input modes from touchscreen, joystick, speciality input devices or single switch scanning. MOVEMENT provides solutions for all those persons who are not able to or for whom it is to cumbersome, risky or exhausting to control a powered wheelchair in the traditional way with the joystick. Manual driving is still possible, though, and can be combined with the automatic mode as convenient. The user interface offers the choice between automatic driving, shared control or full manual mode (upper left three icons in left picture).
Picture of the MOVEMENT User Interface with Joystick showing the drive menu |
Picture of the MOVEMENT User Interface showing the automatic driving targets |
The automatic driving functions are controlled in a high-level mode releasing the user from the need to care about the detailed navigation tasks. The user sitting in the chair just selects what he/she wants the system to do by selecting one of several pre-defined "Bring me to" target locations on the user interface. The system cares about all details like ordering the platform to dock to the chair and navigating to the target position while avoiding any obstacles. The user can abort the operation at any time and take over manual control or select another automatic task.
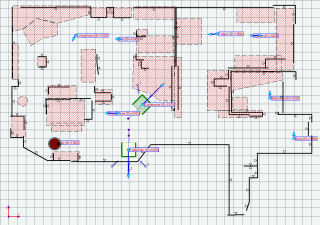
Example of map of rooms showing the defined automatic driving targets |
A map of the rooms with pre-defined target positions serves as information base for the system. In the same easy way the user can call a table or other module like an information terminal to be brought to the current position of the user or aside if no longer used. Again the system cares about all required maneuvers of the platform and the docking. | |
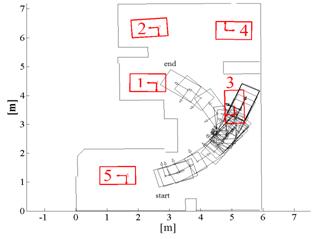
| In shared control mode the joystick input signal is used to steer the platform with control shared between the user and the system. The system automatically plans and executes smooth driving including obstacle avoidance to the currently most likely pre-defined target location while the user can at any time override the system with the joystick by indicating another preferred direction. In this mode the system is performing user intention estimation based on a user model derived from a teach-in procedure.
|
Example of user intention estimation for driving targets |
|
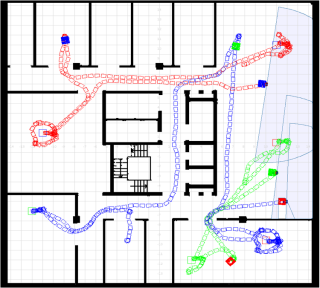
Planning of driving tasks with several platforms and modules |
In larger settings many platforms and modules will be employed to serve multiple users. The MOVEMENT task execution unit is able to perform co-ordination of the driving tasks by sharing the platforms and modules in the most time saving manner while taking care of proper re-charging of the platforms when required. | |
The MOVEMENT prototypes were tested by experts and end users from the MOVEMENT user panels.





Users testing the shared control mode, manual and automatic driving


ICT automatically brought on demand to user sitting in simple chair and Rehacare demonstration
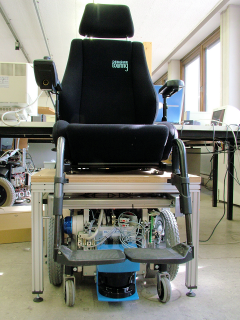
The project developed several prototypes of the autonomous platform with docking mechanism


Movement platform prototypes
and so called Application Modules, which are examples of possible modules that can be served by the mobile platform. Several versions of Chairs ranging from a simple chair over chairs with adapted seats to the multifunctional chair have been prototyped.

Movement simple chair and adapted chair prototypes


Movement prototype Multi Functional Chair (MFC) and transfer of user from MFC to bed
Special modules were built to transport objects and information.


Movement prototypes Information Terminal (ICT) and height Adjustable Table
Scenario with manual drive and ICT (12MB)
Using shared control (25MB)
Last update 06.05.2008